- liczymy średnią arytmetyczną z laboratoriów, projektu, kolokwium
-> brak oceny z kolokwium jest równoznaczny z oceną "2" - średnią zaokrąglamy do najbliższej oceny w kierunku oceny z projektu, np.:
-> średnia: 4,17, ocena z projektu: 5 = ocena ostateczna 4,5
-> średnia: 4,17, ocena z projektu: 4 = ocena ostateczna 4
Systemy wbudowane
Jest to przedmiot składający się z dwóch form dydaktycznych: wykładu oraz laboratoriów. Dodatkowo na przestrzeni semestru studenci przygotowują projekt. Ostateczna ocena jest wynikiem średniej arytmetycznej punktów z każdej z części, przy czym punktacja jest następująca:- wykład (kolokwium): 0-5 pkt, czysta kartka na kolokwium: 2 punkty;
- laboratorium: zaliczenie list podstawowych: 4; poprawna realizacja projektu: 4,5 - 5;
- projekt: 0-5.
Wykład
Wykład odbywa się w czwartki, w sali 1.28/C13 o godzinie 9:15.
Termin kolokwium: 13.06.2019.
OCENY
.
- 28.02: wprowadzenie do wykładu; waga procesu planowania; omówienie projektu
- 7.02: proces projektowy systemu, wymagania, specyfikacja, cykl życia produku.
Prezentacja koncepcji PWM jako uzupełnienie materiału na laboratorium. - 14.02: specyfikacja: forma, precyzja opisu, state charts
SDR i układ RTL8202, oprogramowanie Dump1090 - 21.02: magistrala CAN: protokół MAC, mechanizmy tolerancji błędów
Smart Vehicles, Technologies and Main Applications in Vehicular Ad hoc Networks, A.M.Vegni, M.Biagi, R.Cusani - UART, USART
- SPI, ONE-WIRE
- I2C, profibus
- Przegląd komponentów systemu
- RTOSy (1)
- RTOSy (2)
- Logika programowalna, VHDL, CMOS
- Baterie i bateryjki
Projekt
Oceny . Jeśli brakuje czyjejś oceny, proszę o kontakt.Projekt należy wykonywać w grupach 2-3 osobowych, bez względu na przynależność do grup laboratoryjnych.
Zadaniem projektowym jest stworzenie dokumentacji uprzednio wybranego i skonsultowanego z prowadzącym systemu wbudowanego. Zakres opracowania powinien obejmować:
- Opis środowiska działania systemu i problemów z tym związanych.
- Analizę zapotrzebowania na funkcjonalności w systemie.
- Przedstawienie działania systemu (diagram UML itp.) ze szczególnym uwzględnieniem wygody użytkowania systemu, jego ergonomii, kompletności i tzw. "dobrych praktyk" (tj. logicznych rozwiązań).
- Zestawienie komponentów systemu oraz ich wzajemne interakcje.
- Części składowe systemu. Opis komponentów pod kątem ich funkcjonalności (co robią),
połączeń (zasilanie, interfejsy we/wy) oraz rodzaju przyjmowanych poleceń i generowanych danych
(jakiego typu, jak często, itp.). Ta część powinna też zawierać opis wzajemnej komunikacji
między tymi komponentami.
Przykład: "Waga elektroniczna o rozdzielczości 0,5 g i maksymalnym obciążeniu 2500 g. Sygnały wejściowe (logika TTL): DataRequest, Reset, Tara (aktywne HIGH), sygnały wyjściowe: komunikacja równoległa, 8-bitowa, postać ramek: (...)" - Logika działania. Opis stanów, w jakich system może się znaleźć, mechanizmy przejścia pomiędzy tymi stanami, inne założenia dotyczące np. czasu trwania w każdym z nich.
Projekt należy przesłać drogą mailową (plik pdf) prowadzącemu do końca maja (31.05, godz. 23:59) -- Niedotrzymanie terminu powoduje niezaliczenie tej części przedmiotu (0 punktów).
Przybliżona całkowita liczba stron raportu: 10-15.
Oceniana będzie precyzja i czystość opisu, logika działania systemu.
Laboratoria
Zajęcia odbywają się w sali 317.3 budynku D1.Prowadzący:
- Patryk Kozieł - PN 13-15, 17-19
- Przemysław Kobylański - SR 9-11, 11-13
- Maciej Gębala - PN 15-17
- Marcin Słowik - SR 7-9, PT
- Przemysław Błaśkiewicz - CZW 11-13, 13-15
Przewiduje się dwa rodzaje list: ćwiczeniowe (7-10) oraz jedna projektowa.
Listy ćwiczeniowe przypadające na każdy tydzień laboratoriów pojawiają się na stronie.
Listy te przedstawiają zestaw ćwiczeń
do wykonania na zajęciach. Prowadzący laboratoria ocenia pracę studenta
na bieżąco. Zaliczenie laboratoriów w danym tygodniu następuje decyzją prowadzącego.
Początkowe tygodnie (do maja) zajęć polegają na wykonywaniu list przypadających na dane zajęcia.
W przypadku niezaliczenia laboratoriów w przypadającym im terminie istnieje możliwość ich
odrobienia po wykonaniu wszystkich list ćwiczeniowych.
Po zaliczeniu wszystkich list ćwiczeniowych student otrzymuje punkty za laboratorium (4), które może powiększyć, wykonując w listę projektową, omówioną z prowadzącym. Lista projektowa polega na samodzielnym zaplanowaniu, opracowaniu i wdrożeniu rozwiązania z wykorzystaniem mechanimzów poznanych podczas wykonywania list ćwiczeniowych. Termin wykonania tego zadania ustala się indywidualnie z prowadzącym (sugerowany jest przedostatni/ostatni tydzień semestru).
- Obejrzyj dokładnie płytkę Arduino UNO oraz dostępne Ci inne podzespoły pojazdu. Wykorzystaj opis płytki w sieci, aby zidentyfikować: główny mikrokontroler, piny we/wy (jakie mają funkcje?), diodę LED (ile ich jest? do czego służą?), zasilanie, reset.
- Uruchom środowisko programistyczne Arduino (możesz uruchomić na swoim laptopie). Połącz płytkę arduino przewodem USB z komputerem. Upewnij się, że w menu Narzędzia/Płytka oraz Narzędzia/Port wybrane są, odpowiednio, "Arduino/Genuino Uno" oraz port w stylu /dev/ttyACM0. Możesz sprawdzić, czy wszystko działa za pomocą Narzędzia/Pobierz informacje o płytce.
- Uruchom przykład Przykłady/Basics/Blink i zapoznaj się z kodem oraz samouczkiem. Zajrzyj też do odnośników z rozdziału "Learn more".
- Skompiluj kod (znaczek "ptaszka" z lewej strony belki menu). Sprawdź, jakie informacje o skompilowanym kodzie otrzymasz. Przeanalizuj je. Następnie wgraj (przycisk obok) kod na płytkę przyglądając się temu, co się z nią w tym czasie dzieje (wgrywanie możesz powtórzyć, żeby się upewnić). Sprawdź, czy Twoje domysły na temat kodu i faktyczne jego działanie są zbieżne. Jeśli nie - rozwiąż konflikt :)
- Pobierz ten kod i otwórz w środowisku. Ponownie przeanalizuj kod, postaw tezę co do tego, co on robi. Skompiluj i wgraj na płytkę. Wybierz Narzędzia/Monitor portu szeregowego (Ctrl+Shift+M), ustaw odpowiedni baudrate i zweryfikuj swoje domysły co do programu.
- Korzystając z dwóch przedstawionych programów, napisz swój, który:
- pobierze literę przez port szeregowy,
- wymruga ją za pomocą diody w kodzie Morse'a.
- Pojawiło się zasilanie bateryjne, podłączone do silników. Mogą one obracać kołami, w związku z tym, aby nie spowodować niekontrolowanego ruszenia pojazdu stojącego na biurku, przed włączeniem zasilania należy ustawić pojazd na podstawie z gąbki! Dostępny jest wyłącznik główny, odcinający zasilanie bateryjne. Jeśli Arduino podłączone jest przez kabel USB, to nadal będzie zasilane (ale tylko płytka).
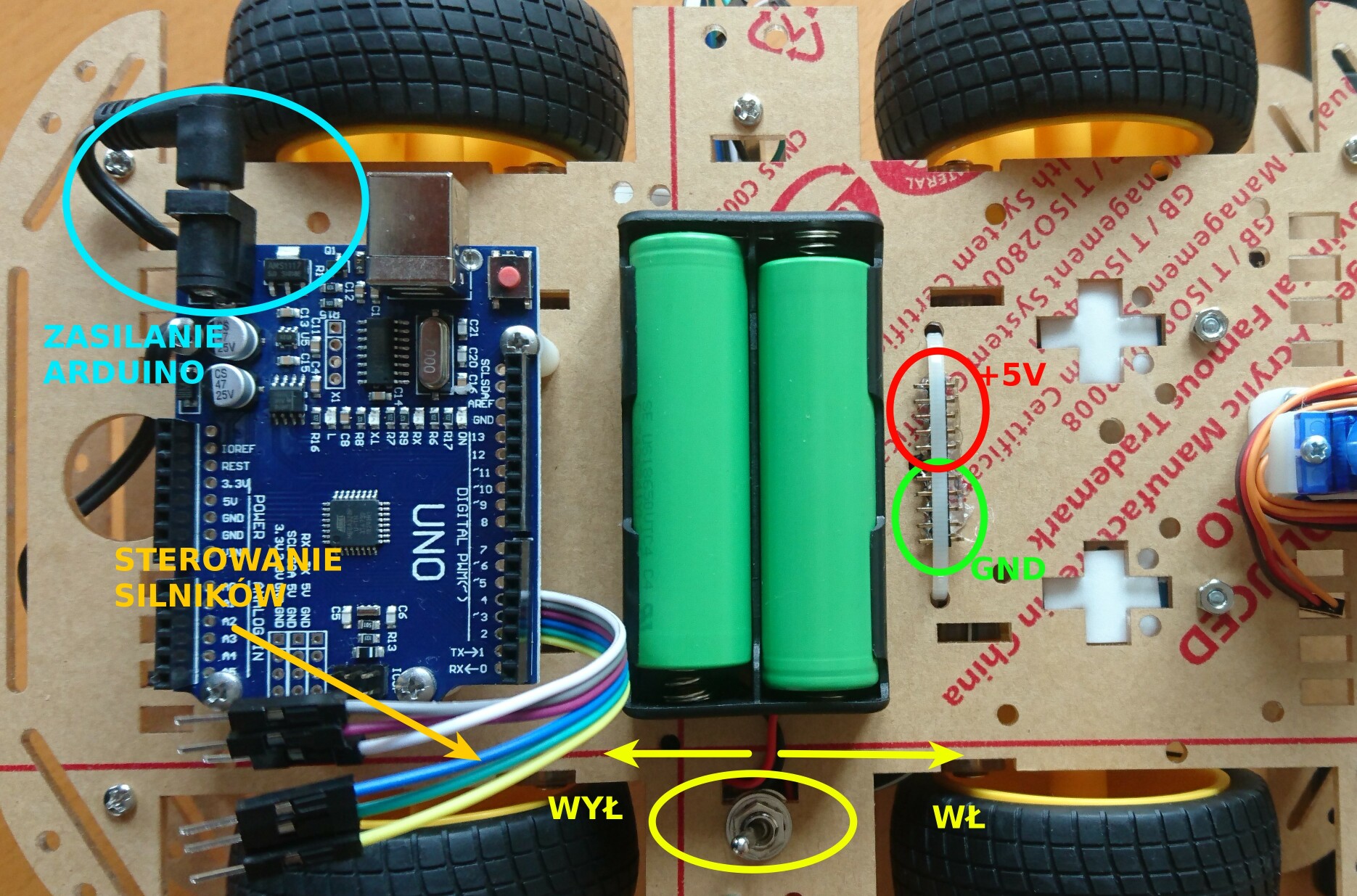
Uwaga. Na fotografii powyżej przewody zasilające silniki są podwójne i wielokolorowe. Na tym zdjęciu są tylko czarno-czerwone. To jest obecna konfiguracja autek.
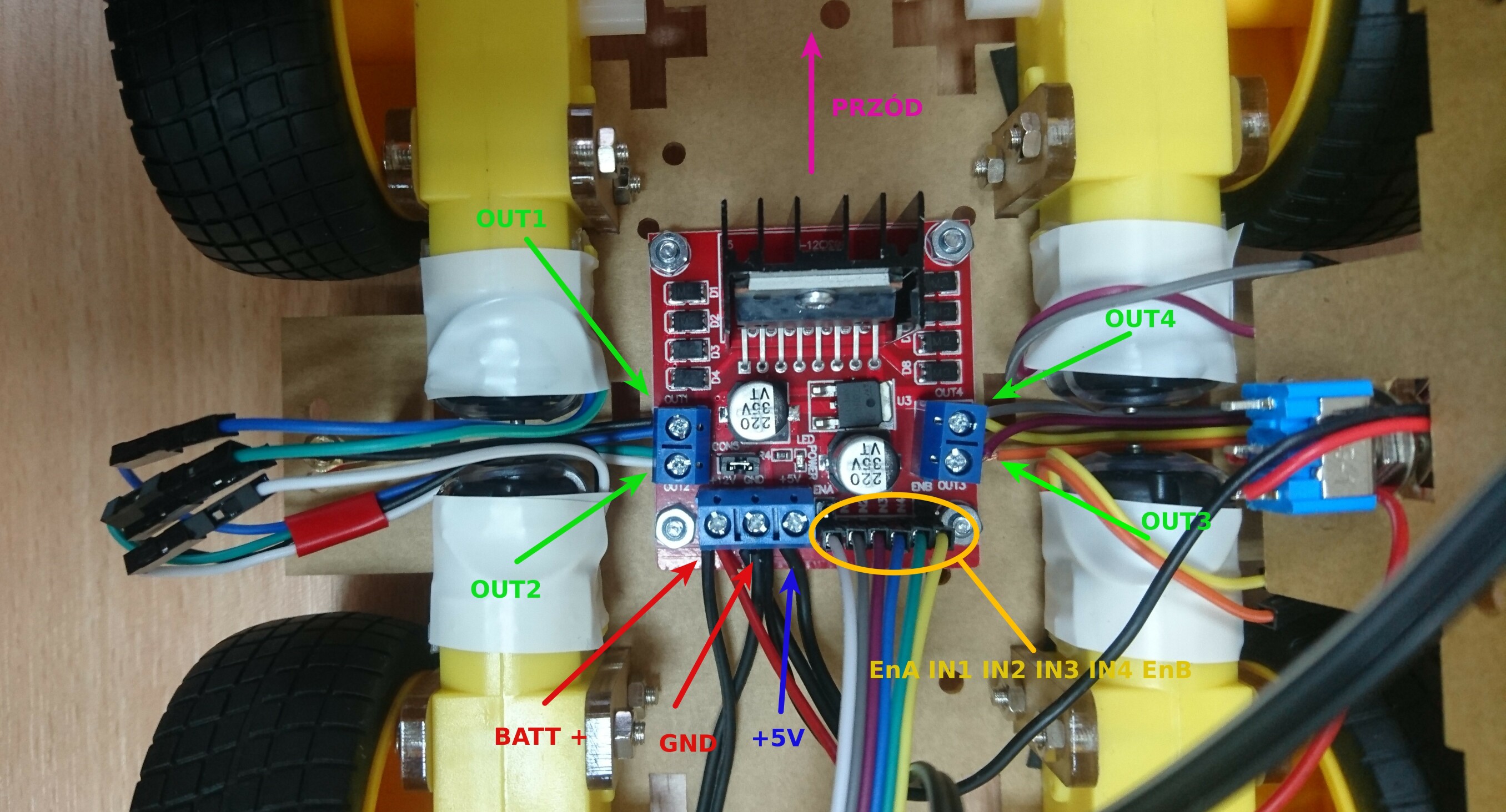
- Układ N298. Pobierz specyfikację układu. Przeanalizuj schemat na pierwszej stronie. Potraktuj obecne tam tranzystory NPN jako elektronicznie włączniki: jeśli na bazie (B) jest „HIGH”, to tranzystor przewodzi między emiterem (E) a kolektorem (C). Przeanalizuj, co się stanie, jeśli na „In1”, „In2”, „EnA” pojawią się różne kombinacje stanów LOW i HIGH. (W tym schemacie zasilanie z baterii podłączane jest do „+Vs” (na środku u góry) i do wspólnej „ziemi” -- symbol krótkiej, grubej, poziomej kreski np. na dole schematu). Silnik podłączany jest do wyjść „OUT1” i „OUT2”. Spróbuj wyobrazić sobie, jak za pomocą tego układu można sterować kierunkiem obracania się kół.
- Programowanie ruchu. Na autku znajdziesz taśmę 6 przewodów, które „pod pokładem” są połączone jak na powyższej fotografii. Uwaga. Autka w wersji 2.0 mogą mieć odwrócone kolory taśmy! Korzystając z dotychczas osiągniętych wyników, spróbuj podłączyć te przewody do pinów 2-13 na Arduino tak, by móc sterować jazdą w przód i do tyłu silnikami po prawej i lewej stronie. (Podpowiedź: przewody biały i żółty [wejścia „EnA” i „EnB” układu N298] podłącz do pinów zasilania „+5V” w okolicach baterii. Po podłączeniu pozostałych przewodów możesz na nich ustawiać stany „HIGH” i „LOW” tak, jak w przypadku świecenia diodą LED.)
- Sterowanie prędkością. Odłącz teraz przewody żółty i biały od zasilania „+5V” i podłącz je do pinów Arduino oznaczonych falką (~), są to: 3, 5, 6, 9, 10, 11. Są to piny, na których można wykonać operację analogWrite(), co spowoduje, że średnie napięcie na tym pinie można zmieniać pomiędzy 0V („LOW”) a 5V („HIGH”). [Więcej o tej technice, zwanej PWM - Pulse Coded Modulation na wykładzie.] Przetestuj, jak kręcą się koła dla różnych wartości zapisywanych do pinów En1 i En2 (zapisanie za niskich wartości może sprawić, że koła nie będą się poruszać).
- Rozbudowa biblioteki. Pobierz archiwum, rozpakuj i otwórz w środowisku Arduino. Przeanalizuj kod i uruchom go ustawiwszy uprzednio autko na podstawce! Dopisz do klasy Wheels metodę goForward(int cm) oraz goBack(int cm), której wywołanie spowoduje, że autko przemieści się o liczbę centymetrów podaną jako parametr.
- Zadanie polega na usprawnieniu pojazdu tak, by przy jeździe wstecz robił „bip-bip”, tak
jak porządna ciężarówka. Dodatkowo należy modyfikować częstotliwość „bipów” w zależności
od prędkości. Mamy do wykorzystania tylko kilka głośniczków, jeśli Tobie zabraknie - możesz użyć
diody LED (pin 13). Otwórz szkic "beepInterrupt".
Przeanalizuj kod (przeczytaj dokumentację dla TimerOne!) i uruchom go na płytce.
Obserwując działanie (bipy lub mruganie diody), modyfikuj
okres działania. Wyślij też dłuższy ciąg (dowolnych) znaków z konsoli (odczytaj je przez Serial)
na płytkę: czy okres mrugania uległ zaburzeniu?
Wykorzystując ten program, zrealizuj zadanie główne - zaktualizuj metodę back() tak, by auto mrugało/bipało przy jeździe wstecz. - Teraz zadanie polega na udoskonaleniu metod moveForward(), moveBack(), które
powstały na poprzednich laboratoriach.
Uwaga. W każdym miejscu, gdzie używasz obiektu Serial spróbuj też wykorzystać obiekt LCD z listy 2. -- zobacz, czy odczyty obrotów (o tym już za chwilę) są różne, gdy wykorzystujesz komunikację z komputerem i bezpośrednie wyświetlanie na ekranie.
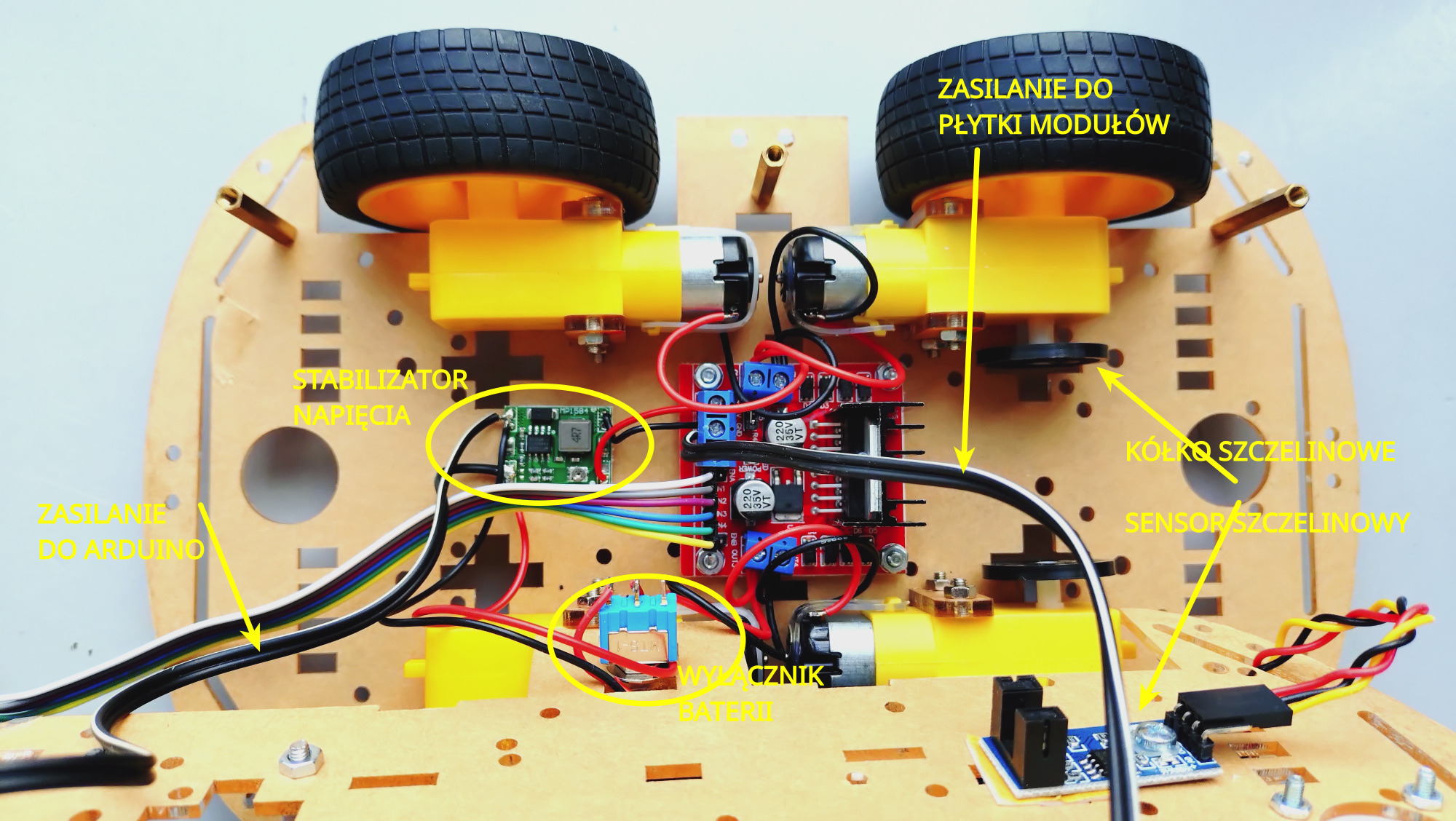
W autkach na osiach przednich kół zostały zamontowane kółka z wyciętymi szczelinami (do wglądu u prowadzącego), oraz czujniki szczelinowe. Idea ich działania jest prosta: jeśli czujnik „widzi” szczelinę w kółku, to jego wyjście DO jest równe HIGH. Jeśli nie, to DO jest LOW.Musimy więc umożliwić Arduino reagowanie na zmianę poziomu DO, ale tak, by nie kolidowało to z innymi zadaniami mikrokontrolera (np. rozmowa przez UART, obliczenia, etc.). Wykorzystamy do tego przerwania zewnętrzne, a w szczególności przerwanie wywoływane przez zmianę stanu pinu (Pin Change Interrupt - PCI). Wykorzystamy piny A0 i A1 - po jednym na czujnik. Przeanalizuj obrazek. Tym pinom przypisane są, odpowiednio, przerwania PCINT8 i PCINT9. Spróbujmy uruchomić mechanizm przerwań dla tych pinów. Jest wiele sposobów na zakodowanie tego, my pójdziemy edukacyjną (trudniejszą) drogą, a potem prostszą.Szczegóły podłączenia:
Do sensorów połączone są dwie splecione, trójkolorowe wiązki:
VCC - czerwony, GND - czarny, DO - żółty.
Na zielonej płytce wiązki te wchodzą w gniazda oznaczone KOŁO PRAWE" i KOŁO LEWE (zwróć uwagę na poaryzację (GND do GND). Następnie sygnały DO wyprowadzone są na złączu "Sygnały" jako PRAWE i LEWE, skąd możesz je odebrać kabelkiem żeńsko-męskim i doprowadzić do płytki Arduino na odpowiednie piny.
Trudniejsza: będziemy pracować ze specyfikacją ATmega328P (strony od 56.). Odnośny kod znajdziesz w szkicu "wheelSensorHard".- Spójrz najpierw na rejestr PCICR i opisy jego poszczególnych bitów. To bit PCIE1 uruchamia przerwania dla PCINT8 i PCINT9 (oraz kilku innych). Ustawmy go w kodzie: PCICR = 0x02.
- Druga rzecz, którą trzeba ustawić, to dla którego spośród pinów, dla których PCIE1 uruchamia przerwanie - ma być wywołana procedura obsługi. Dalsza analiza specyfikacji (punkt 10.2.7) wykazuje, że jest za to odpowiedzialny rejestr PCMSK1. Chcemy uruchomić przerwania dla PCINT8 i PCINT9, a zatem: PCMSK1 = 0x03. Uwaga. Możliwe jest też wykonanie operacji: PCMSK1 |= (1 << PCINT8) | (1 << PCINT9); z tym samym skutkiem.
- Za każdym razem, gdy coś się zmieni na A0 i A1 (bo to Pin Change), zostanie wywołana obsługa przerwania ISR(PCINT1_vect). To, co ta procedura wykona, zależy już od konkretnego zadania, jakie ma obsłużyć, ale regułą jest nie używanie operacji buforowanych i o nieznanych czasach wykonania (np. operacji we/wy). Zwykłe zwiększenie licznika jest OK (pamiętaj, że taka zmienna musi być zadeklarowana jako volatile. UWAGA. Wywołanie obsługi przerwania w naszym wypadku oznacza, że któryś z pinów A0, A1 zarejestrował zmianę. Określenie który to z nich - wymaga po prostu sprawdzenia ich stanu.
- Otwórz szkic i w razie potrzeby zainstaluj bibliotekę (Narzędzia -> Zarządzaj bibliotekami).
- Cała reszta jest prosta i czysta, jeśli wersja "trudna" jest dla Ciebie zrozumiała. Porównaj jednak rozmiary kodów wynikowych w wersji trudniejszej i prostszej. Którą wersję wybierzesz dla jakich przypadków?
ISR(PCINT1_vect){ if( (PINC & (1 << PC0)) ) cnt0++; if( (PINC & (1 << PC1)) ) cnt1++; }i sprawdź, czy coś się poprawiło. Jak myślisz, dlaczego?
Mając dwa sposoby na zliczanie impulsów z tarczy na osiach kół, rozbuduj bibliotekę Wheels o udoskonaloną wersję poruszania się o daną odległość i możliwości skrętu. - (Jako wisienka na torcie) Dysponując możliwością kontroli rzeczywistej prędkości poruszania się autka - narysuj wykres zależności prędkości od parametru funkcji Wheels::setSpeed(int).

Echolokacja to mechanizm określania odległości od przedmiotów odbijających fale dźwiękowe na podstawie czasu przelotu w obie strony (ang. Time of Travel - ToT) impulsu. Prędkość dźwięku dla naszych potrzeb i dokładności możemy przyjąć jako 340 m/s.
Trivia: dlaczego odległość od uderzenia pioruna można określić, licząc sekundy między błyskiem a grzmotem?
Typowymi użytkownikami tej technologii są delfiny i nietoperze. W autku realizacją tego mechanizmu zajmie się moduł HC SR-04.
- Zapoznaj się ze specyfikacją modułu. Dlaczego wysyłane jest kilka impulsów?
- Otwórz kod prezentacyjny do tego laboratorium. Zidentyfikuj w nim obsługę sygnałów, o których mowa w specyfikacji HC SR-04.
- Aby umożliwić autku rozglądanie się, sonar umieściłem na serwomomechanizmie SG-90 micro . Zapoznaj się z krótkim artykułem-kursem na temat działania tego typu urządzeń.
- Uruchom program pokazowy, zaobserwuj, czy wyniki prezentowane na konsoli odpowiadają rzeczywistości.
- Napisz program, który pozwoli autku:
- wyświetlać dane z sonaru (kąt patrzenia, odległość do przeszkody) na ekranie LCD;
- zatrzymywać się przed przeszkodą;
- podejmować decyzję co do sposobu jej ominięcia;
- kontynuować jazdę .
Dołączymy mu moduł LCD 2x 16 znaków oparty na kontrolerze HD44780U. Żeby zaoszczędzić piny na płytce Arduino, skorzystamy z konwertera I2C-LCD.
- Zapoznaj się z biblioteką LiquidCrystal I2C (autor: Marco Schwartz). UWAGA! Jest wiele klonów, które dodają różne funkcjonalności - jeśli chcesz, to możesz użyć innej (ale support tu się kończy :)). Jeśli to potrzebne, ściągnij pliki tej biblioteki do swojego środowiska.
- Uruchom program pokazowy. Poeksperymentuj z nim -- co jest nie tak? Zaproponuj zmiany.
Uwaga 1. Musisz poszukać, jak podłączyć konwerter do płytki -- oznaczenia na konwerterze są jasne, co do Arduino - zachęcam do szukania w dokumentacji.
Uwaga 2. Jeśli program pokazowy nie działa, sprawdź, czy adres urządzenia I2C jest poprawny. Użyj skanera (Plik->Przykłady->Wire->i2c_scanner).
Uwaga 3. Jeśli na wyświetlaczu w obu liniach widzisz tylko prostokąty, użyj potencjometru z tyłu (niebieska kostka), by zmienić kontrast. - Uzupełnij swój kod autka tak, by w sposób ciągły wyświetlał na LCD pomiar odległości, którą auto ma jeszcze przejechać (podawanej jako argument do poprzednio napisanego goForward()/goBack()).
- Wykorzystując drugą linię wyświetlacza, zbuduj "deskę rozdzielczą" -- na dwóch końcach linii wyświetlaj, co aktualnie autko robi z silnikami (prawa-lewa: przód/tył/stop a na środku linii -- zaproponuj animację wskazującą jazdę (przód/tył). (Uwaga. Gdy koła kręcą się w tył, ich prędkość powinna być wyświetlana jako ujemna.)
- Zaimplementuj mechanizm płynnego omijania przeszkody. Autko, napotkawszy na swojej drodze przeszkodę (np. plecak), powinno spróbować ją ominąć bez zatrzymania się, tj. nie wykonując operacji "stop-skręć w miejscu-jedź". Po ominięciu przeszkody pojazd powinien kontynuować jazdę w mniej więcej tym samym kierunku, jak przed rozpoczęciem omijania. Wskazówka: pomyśl, jak osoba niewidoma omijałaby przeszkodę korzystając z laski. Możesz w ten sposób wykorzystać obracający się na serwomotorze sonar jako "próbnik".
- "Wyprowadź" autko na samodzielny spacer: ustaw je metr przed wyjściem z sali 317.3 w kierunku korytarza. Auto powinno po wyjechaniu z sali skręcić w lewo i jechać w kierunku serwerowni. UWAGA! Kontroluj osoby wychodzące z sali 317.4! Po dotarciu do ściany, auto powinno skręcając w prawo podjechać do ściany z oknami i ponownie skręcić w prawo. Następnie powinno jechać tak długo, aby móc skręcić i wrócić do sali 317.3. Po przejechaniu progu powinno się zatrzymać.
-
Zaprojektuj model sprężyny, wykorzystując prawo Hooke'a. Model działania
możesz obejrzeć tutaj.
Auto jest masą. Zamiast rozciągnięcia/ściśnięcia sprężyny użyj odległości autka
od przeszkody. Sprężyna jest "twarda" - nie oscyluje.
Autko ma podjechać do ruchomej przeszkody i powoli się przed nią zatrzymać w odległości ok 100 cm (moment zerowej energii). Zbliżając się, ma kontrolować względny ruch przeszkody i odpowiednio przyspieszać (gonić ją), jeśli przeszkoda się oddala, lub zwalniać (zawracać!), jeśli się przybliża. Po zatrzymaniu się przed przeszkodą, ma utrzymywać od niej stałą odległość tak, aby zawsze znajdować się w punkcie "minimum energii".
- Korzystając z dostępnych modułów (lista poniżej), należy zaprojektować i zrealizować
konkretną funkcjonalność autka. W szczególności należy:
- Przedstawić sposób podłączenia układów.
- Stworzyć dobrze zredagowany i poprawnie działający kod.
- Opisać środowisko testowe, w którym funkcjonalność może byś sprawdzona.
- Zrobić prezentację swojego rozwiązania.
- Przykładowe tematy:
- badanie labiryntu;
- sterowanie klaskaniem;
- mapowanie przestrzeni (odczyty temperatury, naświetlenia).
- Propozycję tematu należy skonsultować z prowadzącym zajęcia.
- Lista przeznaczona jest do wykonania w parach (bądź trójkach), na laboratoriach do końca semestru.
Akcelerometr 3-osiowy MPU-6050 /GY-521 - żyroskop na I2C
Bluetooth HC-05 - master/slave - moduł do APM i AlexMos - Arduino
Czujnik drgań HDX-2801 - czujnik wibracji - Arduino
Czujnik dźwięku na LM393 - detektor hałasu do Arduino - RobotLinking
Czujnik HC-SR04 - ultradźwiękowy pomiar odległości 2-400 cm
Czujnik natężenia światła GY-302 - BH1750 - wyjście I2C - Arduino
Czujnik płomienia - detektor ognia na LM393 do Arduino
Czujnik ruchu micro PIR HC-SR505 - detektor ruchu do Arduino
Moduł śledzenia linii - 5-drożny tracker sensor do robotów Arduino - TCRT5000L
Pilot IR - 17 przycisków z odbiornikiem podczerwieni
Wyświetlacz LCD 2x16 HD44780 - Yellow - alfanumeryczny LCD QC1602B
Konwerter I2C do wyświetlacza LCD HD44780
Kompas DA 5883 na QMC5883L - 3-osiowy cyfrowy kompas magnetometr
Materiały pomocnicze w sieci i na papierze
- Kurs Arduino na forbot.pl podstawy Arduino i środowisko oraz następne
- Jedno z możliwych połączeń dla kompletnego autka:
silnik: 10 - biały, 9 - fioletowy, 8 - szary, 6 - żółty, 5 - zielony, 4 - niebieski
serwo: 3
infra red: 2