Wykład przeznaczony jest dla studentów I roku I stopnia Informatyki na WPPT. Odbywa się we wtorki w godz. - oraz środy w godz. - (sala 127/C13). Na stronie tej znajdziesz informacje o zasadach zaliczenia, realizowanym materiale, literaturze oraz listę zadań.
Zasady zaliczania kursu
Zaliczenie tego kursu polega na otrzymaniu zaliczenia z ćwiczeń. Nie ma egzaminu końcowego. W drugim semestrze będzie mieli kontynuację tego kursu (Algebra Abstrakcyjna i Kodowanie), który kończy się egzaminem.
Ćwiczenia
Na ćwiczeniach odbędą się trzy 45 minutowe kolokwia. Na każdym z nich dostaniecie do zrobienia 4 zadania. Za każde z nich będziecie mogli otrzymać do 5 punktów.
Za aktywność można uzyskać dodatkowo do 15 punktów. Ocena końcowa (C) z ćwiczeń będzie wystawiana za pomocą następującej tabelki:
Pkt
0..19
20..29
30..39
40..45
46..50
51..59
60..75
C
2.0
3.0
3.5
4.0
4.5
5.0
5.5
Literatura
Podstawowa
A. Białynicki-Birula, Algebra, PWN,
B. Gleichgewicht, Algebra, GiS,
A. Mostowski, M. Stark, Elementy algebry wyższej, PWN,
Pojęcia działania binarnego. Łączność, przemienność
Pojęcie grupy
Przykłady grup. Grupa $C_n = (\{0,\ldots,n-1\},\oplus)$, gdzie $x \oplus y = (x+y) \quad \mathrm{mod} \quad n$.
Tw. W grupie istnieje dokładnie jeden element neutralny. Dla każdego elementu $x$ istnieje dokładnie jeden element odwrotny. Oznaczany jest on symbolem $x^{-1}$
Pojęcie izomorfizmu grup
05.10.2016: Grupy - cz. II
Tw. Jeśli $|\mathcal{G}|=2$, to $\mathcal{G}$ jest izomorficzna z $C_2$.
Tw. Niech $n\geq 1$ oraz $\phi_n(x) = x \mod n$. Wtedy $\phi_n$ jest homomorfizmem z $(\mathbf{Z},+)$ na grupę $C_n$.
Pojęcie pierścienia i podstawowe własności działań w pierścieniach: $0\cdot x = x \cdot 0 = 0$, $(-x)\cdot y = -(x\cdot y)$,
$(x+y)^2 = x^2 + x\cdot y + y\cdot x + y^2$
Pojęcie dzielnika zera
Pojęcie ciała liczbowego.
Tw. W ciele nie ma dzielników zera.
Tw (na razie bez dowodu). Pierścień $\mathbf{Z}_n$ jest ciałem wtedy i tylko wtedy, gdy $n$ jest liczbą pierwszą.
Rozwiązywanie prostych równań liniowych w ciałach $\mathbf{R}$, $\mathbf{Z}_5$ i $\mathbf{Z}_7$.
12.10.2016: Pierścienie i ciała
Rozwiązywanie prostych równań liniowych w ciałach skończonych za pomocą wyznaczników.
Rozwiązywanie równań kwadratowych w takich ciałach $K$, w których $1_K+1_K \neq 0_K$:
$$
a x^2 + b x + c = \ldots = a\left(\left(x+\frac{b}{2 a}\right)^2 - \frac{b^2 - 4 a c}{(2 a^2)^2}\right)
$$
Uwaga: $2_K = 1_K+1_K$; $4_K = 1_K+1_K+1_K+1_K$.
Tw. Niech $n\geq 1$ oraz $\phi_n(x) = x \mod n$. Wtedy $\phi_n$ jest homomorfizmem z $(\mathbf{Z},+,\cdot)$ na pierścień $\mathbf{Z}_n$.
Przykład zastosowania pojęcia homomorfizmu:
$$
\phi_3\left(\sum_{k=0}^{n} a_k 10^k\right) = \ldots = \phi_3\left(\sum_{k=0}^{n} a_k\right) ~,
$$
zatem $3|(a_k a_{k-1}\ldots a_1a_0)_{(10)}$ wtedy i tylko wtedy, gdy $3|(a_0+a_1+\ldots+a_k)$.
Wniosek: $9|(a_k a_{k-1}\ldots a_1a_0)_{(10)}$ wtedy i tylko wtedy, gdy $9|(a_0+a_1+\ldots+a_k)$
Wniosek: $11|(a_k a_{k-1}\ldots a_1a_0)_{(10)}$ wtedy i tylko wtedy, gdy $11|(a_0-a_1+a_2-a_3 + \ldots+(-1)^ka_k)$
18.10.2016: Liczby naturalne - I
ZASADA MINIMUM: każdy niepusty podzbiór $\mathbb{N}$ ma element najmniejszy.
ZASADA INDUKCJI MATEMATYCZNEJ: Jeśli $A \subseteq \mathbb{N}$, $0\in A$ oraz $(\forall n)(n\in A \to n+1\in A)$, to $A = \mathbb{N}$.
Tw. Z Zasady Minimum wynika Zasada Indukcji Matematycznej
Tw. Nie istnieje ciąg liczb naturalnych $(a_n)$ taki, że $(\forall n\in\mathbb{N})(a_{n+1} \lt a_n)$.
Tw (O dzieleniu z resztą) Jeśli $n\in\mathbb{N}$, $n\geq 1$ oraz $x \in \mathbb{Z}$ to istnieją liczby $q\in\mathbb{Z}$ i $r \in \mathbb{N}$ takie, że $x = q\cdot n + r$ oraz $0 \leq r \lt n$.
Zagadka: podczas wylicznia NWD(21,13) pojawiły się następujące liczby: 1, 1, 2, 3, 5, 8, 13, 21. Co to jest za ciąg? Czy potrafisz sformułować jakąś hipotezę?
19.10.2016: Liczby naturalne - II
Algorytm Euklidesa
function NWD(a,b){
while (a%b<>0){
[a,b]:= [b,a%b];
}
return b;
}
Rozszerzony Algorytm Euklidesa
function ExtNWD(a,b){
X0=1;Y0=0;
X1=0;Y1=1;
while (a%b<>0){
q:= a/b; //dzielenie całkowito-liczbowe
[a,b,X0,Y0,X1,Y1]:= [b,a%b, X1,Y1,X0-q*X1,Y0-q*Y1];
}
return [b,X1,Y1];
}
Tw. Jeśli $NWD(a,b)=1$ oraz $a|b\cdot c$ to $a|c$.
Tw. Każda liczba $n\geq 2$ dzieli się przez jakąś liczbę pierwszą.
Tw [Euklides] Istnieje nieskończenie wiele liczb pierwszych.
Tw. Każdą liczbę naturalną $n\geq 2$ można przedstawić jednoznacznie w potaci $n = \prod_{i=1}^{k} (p_i)^{\alpha_i}$
dla pewnych liczb pierwszych $p_1 \lt p_2 \lt \ldots \lt p_k$ oraz dodatnich liczb naturalnych $\alpha_1, \ldots \alpha_k$.
Tw. $z^n=1$ wtedy i tylko wtedy, gdy $z \in \{\epsilon_{n,k}:k=0,\ldots,n-1\}$, gdzie
$$
\epsilon_{n,k} = e^{\frac{2\pi k \cdot i}{n}}~.
$$
(patrz aplet Pierwiastki liczby zespolonej)
Zauważamy najpierw, że teza jest równoważna pokazaniu, że $(b!)|(a+1)(a+2)\cdot\ldots\cdot(a+b)$ dla dowolnych $a$, $b$.
Analizujemy przejście indukcyjne, czyli zakładamy, że jeśli $a+b=n$ to teza jest prawdziwa.
Przechodzimy do przypadku $a+b=n+1$.
Stosujemy indukcję po a. Zastępujemy $a$ przez $a+1$.
Chcemy pokazać, że $(b!)|((a+1)+1)((a+1)+2)\cdot\ldots\cdot((a+1)+b)$. A teraz bawimy się tak:
$((a+1)+1)((a+1)+2)\cdot\ldots\cdot((a+1)+b)$ =
$((a+1)+1)((a+1)+2)\cdot\ldots\cdot(a+b)(a+1)$ + $((a+1)+1)((a+1)+2)\cdot\ldots\cdot(a+b) b$ i przyglądamy się temu wyrażeniu.
Uwaga: to jest zadanie na "indukcję w indukcji"; oczywiście dowód prawdziwości tego faktu jest bardzo prosty, jeśli skorzysta się ze współczynników Newtona.
08.11.2016: Liczby zespolone - III
Pierwiastki z dowolnej liczby zespolonej: jeśli $z = r e^{\alpha i}$ ($r\geq$) to
$$
\sqrt[n]{z} = \{\sqrt[n]{r} e^{\frac{\alpha}{n} i} \epsilon_{n,k}: k=0,\ldots,n-1\}~.
$$
Definicja ciała liniowo uporządkowanego
Tw. Ciała liczb zespolonych nie można liniowo uporządkować
Każda liczba $z\in\mathbb{Z}[i]\setminus \mathcal{E}$ jest podzielna przez jakąś liczbę pierwszą
16.11.2016
Liczby Gaussa - c.d
Twierdzenie o dzielemiu z resztą: dla dowolnych $a,b\in\mathbb{Z}[i]$, jeśli $b\neq 0$, to istnieją $p,q \in \mathbb{Z}[i]$ takie, że $a = p\cdot b + q$ oraz $N(q)\lt N(b)$.
Przykład: $(1+i)(1-i) = 2$, zatem $2$ nie jest pierwsza w $\mathbb{Z}[i]$.
Przykład: liczba $3=0\cdot i$ jest pierwsza w $\mathbb{Z}[i]$.
Tw (bez dowodu) Liczba pierwsza $p$ jest liczbą pierwszą w pierścieniu $\mathbb{Z}[i]$ jeśli $p = 4k +3$ dla pewnej liczby naturalnej $k$.
Wielomiany - I
Dziedzina całkowitości: piecień przemienny z jednością, bez dzielników zera
Def. $w|v$ wtedy i tlko wtedy, gdy istnieje wielomian $\alpha$ taki, że $v = \alpha\cdot w$
Def. Wielomian $w\in R[x]$ jest nierozkładalny, jeśli $deg(w)\geq 1$ oraz nie istnieją wielomiany $v_1,v_2 \in R[x]$ takie, że $w = v_1\cdot v_2$ oraz $\deg(v_1)\lt\deg(w)$ oraz $\deg(v_1)\lt\deg(w)$.
Fakt: Wielomiany pierwszego stopnia (liniowe) są nierozkładalne
Tw. Każdy wielomian stopnia większego lub równego jeden jest iloczynem wielomianów nierozkładalnych.
Wielomiany nad ciałami
Tw (o dzieleniu) z resztą) Niech $w,v\in K[x]$ oraz $v \neq 0$. Istnieją wtedy wielomiany $q,r\in K[x]$ takie, że $w = q\cdot v + r$ oraz $\deg(q) \lt \deg(v)$
Wniosek: Jeśli $w\in K[x]$, to $w(a)=0$ wtedy i tylko wtedy, gdy $(x-a)|w$
Tw. Jeśli $w\in \CC[x]$ oraz $\deg(w) = n \geq 1$, to istnieją liczby $\alpha_1, \ldots, \alpha_n\in\CC$ oraz liczba $c\in\CC$ takie, że
$$
w(x) = c\cdot(x-\alpha_1)\cdot(x-\alpha_2)\cdot\ldots\cdot(x-\alpha_n)~.
$$
(jest to prosta konsekwecja Zasadniczego Twierdzenia Algebry)
Tw. Jeśli $w\in \RR[x]$ oraz $\deg(w) = n \geq 1$, to istnieją liczby $\alpha_1, \ldots, \alpha_k\in\RR$ oraz wielomiany moniczne (największy niezerowy współczynniki jest równy 1) $p_1, \ldots, p_m$ stopnia drugiego, o wyróżnikach mniejszych od zera oraz liczba $c\in\RR$, takie, że
$$
w(x) = c\cdot(x-\alpha_1)\cdot\ldots\cdot(x-\alpha_n)p_1(x) \cdot \ldots\cdot p_m(x)~.
$$
Główna obserwacja wykorzystana w dowodzie: jeśli $w\in \RR[x]$ oraz $z\in\CC$ jest takie, że $w(z)=0$ to również $w(\overline{z})=0$.
Homomorfim indukowany
Niech $R_1$ i $R_2$ będą pierścieniami; rozważamy homomorfizm $\phi:R_1\to R_2$ bedzie homomorfizmem; wtedy funkcja
$$
\overline{\phi}(\sum_n a_n x^n) = \sum_n \phi(a_n)x^n
$$
jest homomorfizmem z $R_1[x]$ w $R_2[x]$.
23.11.2016
Wielomiany - III
Tw. Każdy wielomian z $\RR[x]$ stopnia nieparzystego ma pierwiastek rzeczywisty.
Rozwiązywanie równań stopnia trzeciego z $\CC[x]$
NWD wielomianów.
Tw. Jeśli wielomian $w \in K[x]$ (K - ciało) jest nierozkładalny, $w|(u\cdot) v$ oraz $\neg(w|u)$ to $u|v$
Twierdzenie o jednoznaczności rozkładu dla $K[x]$, gdy $K$ jest ciałem
Wielomiany z $\ZZ[x]$
Jeśli $w(x) = a_0+a_1x+\ldots+a_nx^n \in \ZZ[x]$, $\mathrm{nwd}(p,q)=1$ oraz $w(\frac{p}{q})=0$ to $p|a_0$ oraz $q|a_n$
Kryterimu Eisensteina nierozkladalności wielomianów w $\ZZ[x]$.
Def. Wielomian jest pierwotny:jeśli jego zawartość wynosi $1$.
Lemat. Iloczyn wielomianów pierwotnych jest wielomianem pierwotnym
Tw. (Gauss) Wielomian $w\in\ZZ[x]$ jest nierozkładalny w $\ZZ[x]$ wtedy i tylko wtedy, gdy jest nierozkładalny w $\QQ[x]$.
PRÓBNY ALARM.
Def. Charakterystyką ciała $K$ nazywamy liczbę $\chi(K) = \min\{k\in\NN: \underbrace{1+\ldots + 1}_{k} = 0\}$. Jeśli nie ma takiego $k$, że $\underbrace{1+\ldots + 1}_{k} = 0$ to kładziemy $\chi(K)=0$.
Tw. Dla każdego ciała $K$, jeśli $\chi(K)\neq 0$, to $\chi(K)$ jest liczbą pierwszą
Def. Niech $K$ bedzie ciałem o charakterystyce $0$. Dla $w(x) = \sum_{n} a_nx^n \in K[x]$ definiujemy
$$
w'(x) = \sum_{n\geq 1} n a_n x^{n-1}~.
$$
Tw: $(f\cdot g)' = f'\cdot g + f\cdot g$
Def. Liczba $a$ jest pierwiastkiem $k$-krotnym wielomianu $w$, jeśli $w(x) = (x-a)^v(x)$ oraz $v(a)\neq 0$
Tw. $a$ jest pierwiastkiem $k$-krotnym wielomianu $w$ wtedy i tylko wtedy, gdy $w(a)=0$, $w'(a)=0$, ... ,
$w^{(k-1)}(a) = 0$ oraz $w^{(k)}(a) \neq 0$
Przykład: $V=\RR^3$, $e_1=(1,0,0)$, $e_2 = (0,1,0), e_3=(0,0,1)$. Zbiór $\{e_1,e_2,e_3\}$ jest maksymalnym zbiorem liniowo niezależnym.
Osobom, które są zainteresowanie głębszym poznaniem liczb całkowitych Gaussa proponuję zapoznanie się z artykułem "THE GAUSSIAN INTEGERS" Keith Conrad'a
06-12-2016: Bazy
Def. Baza: maksymalny w sensie zawierania zbiór liniowo niezależny.
Lemat. Jeśli $E$ jest liniowo niezależny oraz $x\in V\setminus\span{E}$, to $E\cup\{x\}$ jest liniowo niezależny.
Wniosek. Jeśli $E$ jest bazą to $\span{E} = V$.
Tw. (z wykładu ze Wstępu do logiki) Jeśli $A$ jest liniowo niezależny, to istnieje baza $E$ taka, że $A \subseteq E$.
Tw (Steinera o wymianie) Jeśli $\span{S} = V$ oraz $E$ jest liniowo niezależny i skończony to istnieje $S_1 \subseteq S$ taki, że $|S_1|=|E|$ oraz $\span{E\cup(S\setminus S_1)} = V$.
Wniosek. Jeśli $V$ ma bazę mocy $n$, to dowolna inna baza $V$ jest mocy $n$.
Def. $dim(V)$= moc bazy przestrzeni $V$.
Def. Ciąg $(e_1,\ldots,e_n)$ jest bazą uporządkowaną jeśli $\{e_1,\ldots,e_n\}$ jest bazą.
Def. Jeśli $\mathcal{E} = (e_1,\ldots,e_n)$ jest bazą uporządkowaną oraz $X=\lambda_1e_1+\ldots+\lambda_n e_n$ to
$$
[x]_{\mathcal{E}} = \begin{bmatrix} \lambda_1\\ \vdots\\ \lambda_n \end{bmatrix}
$$
nazywamy współrzędnymi $x$ w bazie $\mathcal{E}$.
Def: Zbiór $H\subseteq V$ jest podprzestrzenią $V$ jeśli $(\forall x,y\in H)(x+y\in H)$ oraz $(\forall x\in H)(\forall \lambda)(\lambda\cdot x\in H)$.
Tw. Załóżmy, że $H \subseteq V$. Następujące warunki sa równoważne:
$H$ jest podprzestrzenią przestrzeni $V$
$(\forall x,y \in H)(\forall \lambda,\mu\in K)(\lambda\cdot x + \mu\cdot y \in H)$
$\span{H} = H$
07-12-2016: Przekształcenia liniowe
Wymiary podprzestrzeni przestrzeni $K^n$
Podprzestrzenie jednowymiarowe w $(\ZZ_p)^2$
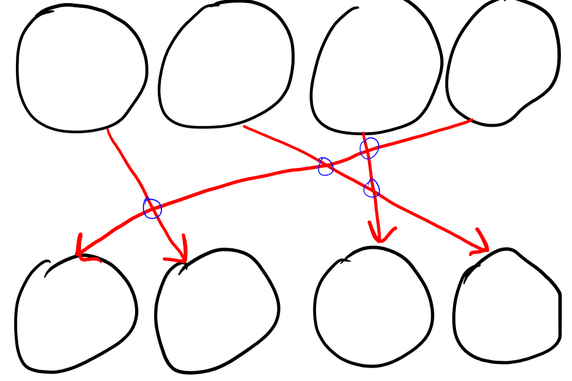
Def. Funkcja $F:V_1\to V_2$ jest przekształceniem liniowym jeśli $F(\lambda x+\mu y) = \lambda F(x)+\mu F(y)$ dla dowolnych $x,y\in V_1$ oraz $\lambda,\mu \in K$. $Lin(V_1,V_2)$ = zbiór wszystkich przekształceń liniowych z $V_1$ do $V_2$
Jeśli $F$ jest liniowa, to $F(0) = 0$
Opis przekształceń liniowych z $\RR^2\to\RR^2$:
$$
F((x,y) = (ax+cy,bx+dy)
$$
dla pewnych $a,b,c,d\in\RR$
Pojęcie macierzy wymiaru $m\times n$ elementów ciała $K$:
$$
A = \begin{bmatrix}a_{11}&a_{12}&\ldots&a_{1n}\\
\vdots&\vdots&\ldots&\vdots\\
a_{m1}&a_{m2}&\ldots&a_{mn} \end{bmatrix}
$$
Oznaczenie: $M_{m\times n}(K)$ = zbiór wszystkich macierzy wymiaru $m\times n$ nad ciałem $K$.
Mnożenie macierzy przez wektor:
$$
\begin{bmatrix}a_{11}&a_{12}&\ldots&a_{1n}\\
\vdots&\vdots&\ldots&\vdots\\
a_{m1}&a_{m2}&\ldots&a_{mn}
\end{bmatrix}
\circ
\begin{bmatrix}x_1\\x_2\\\vdots\\x_n\end{bmatrix}
\begin{bmatrix}\sum_{j=1}^{n}a_{1j}x_j\\\sum_{j=1}^{n}a_{2j}x_j\\\vdots\\\sum_{j=1}^{n}a_{mj}x_j\end{bmatrix}
$$
czyli jeśli $A=(a_{ij}) \in M_{m\times n}$, $x\in K^n$, $y\in K^m$ oraz $y = A\circ x$, to
$$
y_i = \sum\limits_{j=1}^{n} a_{ij}\cdot x_j
$$
dla wszystkich $j\in\{1,\ldots,m\}$
Opis przekształceń z $Lin(\RR^2,\RR^2)$: jeśli $F((x_1,x_2))=(y_1,y_2)$, to
$$
\begin{bmatrix}y_1\\y_2\end{bmatrix}
=
\begin{bmatrix}a&c\\b&d\end{bmatrix}
\circ
\begin{bmatrix}x_1\\x_2\end{bmatrix}
$$
gdzie $F((1,0)) = (a,b)$ oraz $F((0,1))=(c,d)$.
Przykłady: Obrót o kąt $\alpha$
$$
M(O_\alpha) =
\begin{bmatrix}\cos(\alpha)&-\sin(\alpha)\\\sin(\alpha)&\cos(\alpha)\end{bmatrix}
$$
13.12.2016: Macierze i odwzorowania liniowe
Macierz odwzorowanie liniowego $F:K^n \to K^m$:
$$
M(F) = [F(e_1)| \ldots | F(e_n)] \in M_{m\times n}
$$
gdzie $e_1,\ldots,e_n$ jest bazą przestrzeni $K^n$.
Jeśli $F,G \in Lin(V_1,V_2)$ i $\lambda \in K$ to $\lambda F, F+G \in Lin(V_1,V_2).$
Wniosek: $lin(V_1,V_2)$ jest przestrzenią liniową
Mnożenie macierzy przez skalar, dodawanie dwóch macierzy tego samego rozmiaru.
Mnożenie macierzy: jeśli $A= (a_{ij})\in M_{k\times m}$, $B=(b_{j,k}) \in M_{m\times n}$ to
$A\circ B = (c_{ik}) \in M_{k\times n}$ jest macierzą o elementach
$$
c_{ik} = \sum\limits_{j=1}^{n} a_{ij} b_{jk} ~,
$$
Patrz YouTube
Dla $F\in Lin(V_1,V_2)$ określamy $ker(F) = \{x\in V_1: F(x)=0\}$ oraz $rng(F) = \{F(x): x\in V_1\}$
Tw. $ker(F)$ jest podprzestrzenią $V_1$ oraz $img(F)$ jest podprzestrzenią $V_2$
14.12.2016: Macierze i odwzorowania liniowe
Twierdzenie: Jeśli $f\in Lin(V_1,V_2)$ to
$$
dim(V_1) = dim(ker(f)) + dim(img(f))~.
$$
Dowód (szkic). Bierzemy taką bazę $\{e_1,\ldots,e_k,\ldots,e_n\}$ przestrzeni $V_1$, że
$\span{\{e_1,\ldots,e_k\}} = ker(f)$. Pokazujemy, że zbiór $\{f(e_{k+1}),\ldots,f(e_n)\}$ jest bazą $img(f)$.
Niech $A=\begin{bmatrix}a&b\\c&d\end{bmatrix}$. Złóżmy, że $\Delta = ad-bc \neq 0$. Wtedy
$$
A^{-1} = \frac{1}{\Delta}\begin{bmatrix}d&-b\\-c&a\end{bmatrix}
$$
(pokazaliśmy to bezpośrednim sprawdzeniem, że dla tak określonego $A^{-1}$ mamy $A\cdot A^{-1} = I$; sprawdzenie tego, że $A^{-1}\cdot A=I$ zostawiliśmy jako ćwiczenie).
Def. Iloczynem skalarnym w przestrzeni $\RR^n$ nazywamy funkcję $\IS{\cdot}{\cdot}:\RR^n\cdot\RR^n\to \RR$ określoną wzorem $\IS{x}{y} = \sum_{i=1}^{n}x_i y_i$.
Uwaga: W przestrzeniach $\CC^n$ trzeba postępować trochę inaczej; określamy tam
$\IS{x}{y} = \sum_{i=1}^{n} x_i \overline{y_i}$ - ale tym zajmiemy się później.
Oznaczenie: Jeśli $M\in M_{n\times n}(K)$, to $M_{i,j}$ jest macierzą, która powstaje z macierzy $M$ przez wykreslenie $i$-tego wiersza i $j$-tej kolumny (tak zwany minor)
Def. Element $A_{ij} = (-1)^{i+j} \det(M_{i,j})$ nazywamy elementem sprzężonym z elementem $a_{ij}$ macierzy $A = (a_{ij})$.
Uwaga: stosujemy oznaczenia z poprzedniego wykładu.
Tw:
$$
\sum_{j=1}^{n} a_{ij} A_{kj} =
\begin{cases}
\det(A) & i=k\\
0 & i \neq k
\end{cases}
$$
Def. $adj(A) = [A_{ij}]^T$
Tw. $A \cdot adj(T) = \det(A) I$
Tw. Jeśli $\det(A) \neq 0$ to istnieje macierz odwrotna $A^{1}$; mamy $A^{-1} = \frac{1}{\det(A)}adj(A)$
Tw. $\det(A\circ B) = \det(A)\cdot \det(B)$
Wniosek. $A$ jest odwracalna wtedy i tylko wtedy, gdy $\det(A)\neq 0$
Wniosek: Zbiór $\{A\in:M_{n\times n}(K): \det(A)\neq 0\}$ z działaniem $\circ$ (mnożenie macierzy) jest grupą. Oznaczana jest ona $GL_n(K)$ (General Linear Group)
Wzory Cramera: Jeśli $A= [k_1|\ldots|k_n]$ oraz $\det(A) \neq 0$, to rozwiązanie układu równań $A\circ[x_1,\ldots,x_n]^T = [b_1,\ldots, b_n]^T$ jest dane wzorami
$$
x_i = \frac{\det[k_1|\ldots|k_{i-1}|b|k_{i+1}|\ldots|K_n]}{\det(A)}
$$
(YouTube: uwaga: stosowana tam jest reguła Sarrusa w dosyć egzotycznej postaci
11.01.2017: Rząd macierzy
Def. Rząd kolumnowy macierzy $A$: $rank_c(A)$ = maksymalna moc niezależnego zbioru kolumn
Tw. $rank_c(A) = \dim(rng(F_A))$, gdzie $F_A(x) = A\circ x$
Def. Rząd wierszowy macierzy $A$: $rank_w(A)$ = maksymalna moc niezależnego zbioru wierszy.
Tw: $rank_c(A) = rank_w(A)$
Tw: $rank(A)$ jest równy maksymalnemu rozmiarowi kwadratowej podmacierzy macierzy $A$ o niezerowym wyznaczniku
Obserwacja: dla danej macierzy $A = [k_1|\ldots|k_n]$ oraz danego $b$ następujące warunki są równoważne:
$(\exists x)(A\cdot x = b)$
$b \in rng(F_A)$
$b \in \span{[k_1|\ldots|k_n]}$
$\dim(rng(F_A)) = dim(\span{[k_1|\ldots|k_n|b]})$
Wniosek. Dla danej macierzy $A = [k_1|\ldots|k_n]$ oraz danego $b$ następujące zdania sa równoważne:
Def. Wektorem własnym macierzy $A \in M_{n\times n}(K)$ nazywamy taki wektor $x \neq 0$, że dla pewnego $\lambda\in K$ mamy $A\cdot x = \lambda x$. Element $\lambda$ nazywamy wartością własną macierzy $A$ skojarzoną z wektorem $x$.
Tw: $\lambda$ jest wartością własną macierzy $A$ wtedy i tylko wtedy, gdy $\phi_A(\lambda)=0$.
Tw. Jeśli $\lambda_1, \ldots, \lambda_k$ są parami różnymi wartościami własnymi macierzy $A$oraz $x_1,\ldots, x_k$ są odpowiadającymi im wektorami własnymi, to zbiór $\{x_1,\ldots,x_k\}$ jest liniowo niezależny.
24.01.2017: Wartości i macierze własne: II
Przykład 1: $A = \begin{bmatrix}0&1\\1&0\end{bmatrix}$; wartości własne: 1, -1;
wektory własne $f_1=(1,1)$, $f_2 = (-1,1)$; Funkcja $F_A(x) = Ax$ jest odbiciem płaszczyzny $\RR^2$ względem prostej $y=1$.
Przykład 2: $A = \begin{bmatrix}\frac32&\frac12\\\frac12&\frac32\end{bmatrix}$; wartości własne: 2,1; wektory własne: $f_1 = (1/\sqrt{2}, 1/\sqrt{2})$, $f_2=(-1/\sqrt{2},1/\sqrt{2})$;
Macierz odwzorowania $F_A$ w bazie $(f_1,f_2)$: $\Sigma= \begin{bmatrix}2&0\\0&1\end{bmatrix}$
Oznaczanie: Jeśli $\mathcal{F}=(f_1,\ldots,f_n)$ jest bazą uporządkowaną oraz $x=\sum_{i=1}^{n} \lambda_i f_i$, to $[x]_\mathcal{F} = [\lambda_1,\ldots,\lambda_n]^T$.
ZAMIANA BAZY: Niech $\mathcal{E}=(e_1,\ldots,e_n)$ i $\mathcal{F}=(f_1,\ldots,f_n)$. Niech $F=[[f_1]_\mathcal{E}|\ldots|[f_n]_\mathcal{E}]$. Wtedy
$$
[x]_\mathcal{E} = F \circ [x]_\mathcal{F}
$$
oraz
$$
[x]_\mathcal{F} = F^{-1} \circ [x]_\mathcal{E}
$$
Przykład 2 - cd: Zauważyliśmy, że macierz przejścia z bazy standardowej $\mathcal{E}$ do bazy $\mathcal{F}$ jest obrotem o kąt $\pi/4$. Zatem
$$
A = \mathcal{O}_{\pi/4} \circ \begin{bmatrix}2&0\\0&1\end{bmatrix} \circ \mathcal{O}_{-\pi/4}
$$
Liczby Fibonacciego: $F_0=0$; $F_1 = 1$; $F_{n+2}= F_{n}+F_{n+1}$.
Zauważamy, że
$$
A^{n} \begin{bmatrix}F_0\\F_1\end{bmatrix} = \begin{bmatrix}F_n\\F_{n+1}\end{bmatrix}
$$
Wartości własne macierzy $A$: $\lambda_1 = \frac{1+\sqrt{5}}{2}$, $\lambda_1 = \frac{1-\sqrt{5}}{2}$. Zatem
$$
A = M \begin{bmatrix}\lambda_1&0\\0&\lambda_2\end{bmatrix} M^{-1}
$$
gdzie $M$ jest macierzą przejścia.
Zatem
$$
A^n = M \begin{bmatrix}\lambda_1^n&0\\0&\lambda_2^n\end{bmatrix} M^{-1}
$$
Zatem $F_n = \alpha \lambda_1^n + \beta \lambda_2^n$ dla jakiś $\alpha, \beta$.
Rozwiązujemy układ równań $0 = \alpha+\beta$, $1 = \alpha\lambda_1+\beta\lambda_2$ i znajdujemy wzór
$$
F_n = \frac{1}{\sqrt{5}}\left(
\left(\frac{\sqrt{5}+1}{2}\right)^n +
(-1)^{n+1}\left(\frac{\sqrt{5}-1}{2}\right)^n
\right)~.
$$
$c_1 = (-1)^{n-1} Tr(A)$, gdzie $Tr(A) = \sum_k a_{kk}$
25.01.2017: Ortogonalizacja
Tw. $Tr(AB)=Tr(BA)$
Proces ortogonalizacji Gramma-Schmidta
Bazy ortogonalne
Jeśli $\{f_1,\ldots,f_n\}$ jest bazą ortonormalną oraz $x = \sum_{i=1}^{n}\lambda_i f_f$, to
$\lambda_i = \IS{x}{f_i}$
$|x|^2 = \sum_{i=1}^{n}\lambda_i^2$
Def. Macierz $A$ jest ortogonalna, jeśli jej kolumny tworzą układ ortonormalny
Tw. Jeśli $A$ jest ortogonalna, to $AA^T = I$
Wniosek. Jeśli $A$ jest ortogonalna to $A^{-1}=A$
Wniosek. Jeśli $A$ jest ortogonalna to $A^{-1}$ jest ortogonalna
Wniosek. Jeśli $A$ jest ortogonalna to $\det(A)\in\{-1,1\}$
Tw. Jeśli $A$ jest ortogonalna, to $\IS{Ax}{Ay}= \IS{x}{y}$ dla dowolnych $x,y$
Def. $O(n)$ = zbiór macierzy ortogonalnych rozmiaru $n\times n$
Wniosek. $O(n)$ jest grupą z działaniem określonym jako mnożenie macierzy
Def. $SO(n) = \{A\in O(n): \det(A)=1\}$
Struktura grup $O(2)$ i $SO(2)$: elementy $O(2)$ to obroty płaszczyzny oraz odbicia płaszczyzny względem prostych przechodzących przez $(0,0)$; elementy $SO(2)$ to obroty
31.01.2017: Przestrzenie unormowane
Tw.[Euler] Jeśli $T$ jest ortogonalnym przekształceniem $\RR^3$, to $T$ jest obrotem względem pewnej prostej przechodzącej przez $(0,0,0)$
Pojęcie normy na przestrzeni wektorowej
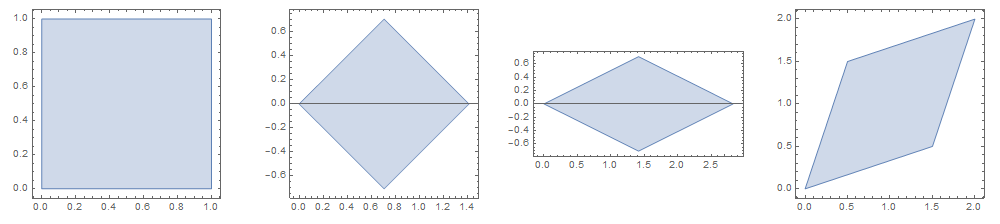
Dla $p\geq 1$ oraz $x\in\RR^n$ definiujemy
$$
||x||_p = \left(\sum_{k=1}^n |x_i|^p\right)^{\frac1p}
$$
Tw [Young] Jeśli $p,q\geq 1$, $1/p+1/q=1$ oraz $a,b\geq 0$ to
$$
ab \leq \frac{a^p}{p} + \frac{b^q}{q}
$$
Tw [Nierówność Holdera] Jeśli $p,q\geq 1$, $1/p+1/q=1$ oraz $x,y\in\RR^n$ to
$$
\sum_{i=1}^n |x_i y_i| \leq ||x||_p ||y||_q
$$
Tw [Nierówność Minkowskiego] Jeśli $p,q\geq 1$, $1/p+1/q=1$ oraz $x,y\in\RR^n$ to
$$
||x+y||_p \leq ||x||_p + ||y||_p
$$
Wniosek: $||\cdot||_p$ jest normą na $\RR^n$
Def. Metryka generowana przez normę: $d(x,y) = ||x-y||$
Pojęcie zbieżności i ciągu podstawowego w przestrzeni metrycznej.
Def $(V,||\cdot||)$ jest przestrzenią Banacha, jeśli jest zupełną przestrzenią unormowaną
Definicja iloczynu skalarnego dla przestrzeni nad $\RR$ oraz $\CC$
02.01.2017: SVD
Lemat. Jeśli $A\in M_{n\times n}(\RR)$ jest symetryczna oraz $\lambda$ jest wartością własną macierzy $A$, to $\lambda\in\RR$.
Tw. Jeśli $A\in M_{n\times n}(\RR)$ jest symetryczna, to istnieje macierz ortogonalna $U$ oraz macierz przekątniowa $\Sigma$ taka, że
$$
A = U\circ \Sigma \circ U^T~.
$$
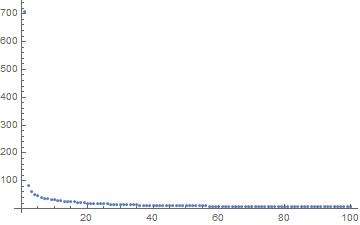
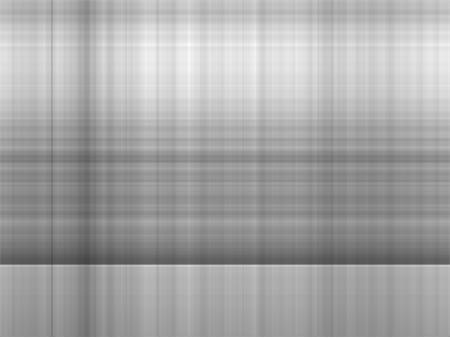
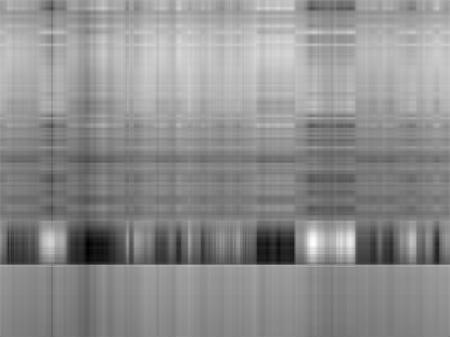
Tw (SVD) Jeśli $A\in M_{m\times n}(\RR)$ to istnieją macierze ortogonalne $U\in M_{m\times m}$,
$V\in M_{n\times n}$ oraz macierz diagonalna $\Sigma\in M_{m\times n}$ taka, że
$$
A = U\circ\Sigma \circ V^T~.
$$
z różnymi wartościami parametru k (np. Approx[matrix, 1]).
Obcinamy do 1 (największej) wartości singularnej (współczynnik kompresji: 0.00162101):
Obcinamy do 2 pierwszych wartości singularnych (współczynnik kompresji: 0.00324203):
Obcinamy do 3 pierwszych wartości singularnych (współczynnik kompresji: 0.00486304):
Obcinamy do 10 pierwszych wartości singularnucj (współczynnik kompresji: 0.00486304):
Obcinamy do 50 pierwszych wartości singularnych (współczynnik kompresji: 0.0810507):
Obcinamy do 100 pierwszych wartości singularnych (współczynnik kompresji: 0.162101):
Uwaga (o tym nie zdążyłem powiedzieć na wykładzie): ta ilustracja z kompresją obrazu nie jest najwłaściwszym wykorzystaniem rozkładu SVD. Do kompresji obrazów mamy znacznie lepsze, wyspecjalizowane, procedury. Ten przykład ilustruje tylko o co chodzi w technice SVD. A lepsze zastosowania oraz dokładniejszą analizę omówionej metody omówimy sobie kiedyś w przyszłości.